Parallel kinematic machines for home CNC
I'm just going to splash some thoughts, links and photos down here for anyone interested in parrallel machine tools.
First, the document I produced for running parallel machines from Mach3 using the equations function can be downloaded here:
Parallel machines using Mach3 and Rhino3D (407kb)
(you will need adobe acrobat reader)
Machines:
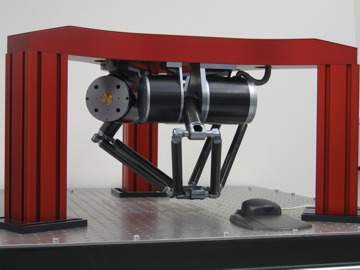
It is possible to build variable strut length machines for home CNC I'm sure I just know I can build a better machine if I don't have to make telescoping actuators. For this reason I prefer the fixed strut length machines such as the triaglide.
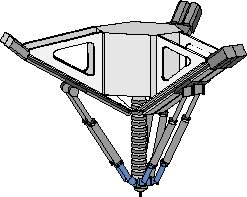
The triaglide, the parallelograms keep the tool from tilting in any direction
If you are interested the equations for the carriage positons above are as follows:
b = (x-dx) - sqrt(r^2 - (z+dz)^2 - (y^2)
a = (x+dx) + sqrt(r^2-(d+(y-dy))^2-(z+dz)^2)
c = (x+dx) + sqrt(r^2-(d-(y+dy))^2-(z+dz)^2)
where 0,0,0 is at this end of the middle rail b (with + x going away though), r is the strut length and d the distance between the axis. The dx,dy,dz correspond to the offest from the tip of the tool to the end of the corresponding strut, they are different for each. The "end" of a strut is actually at the mid point between the ends of the stut pairs.

This is a 3-axis head that can tilt in two axis and extend in z.
The basic hexaglide principle
This is a 6-axis hexaglide type machine this a different geometry

Re-orientated for two sided milling and a rotary table

The Hexel rotobot is very cool and looks buildable, this one provides 6-axis of movement.
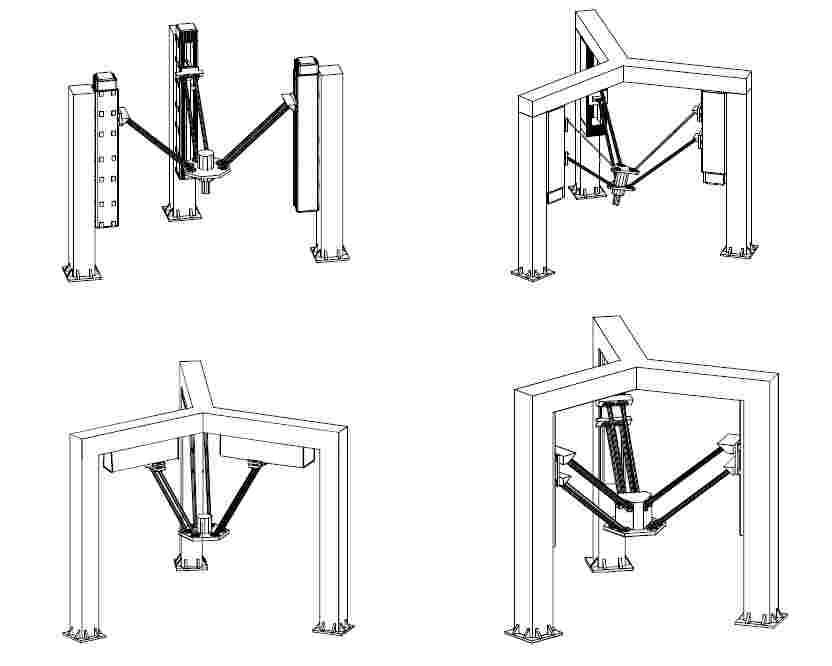
clockwise: a triaglide with vertical rails, a hexaglide, a triaglide with extra stiffness, a triaglide with horizontal rails. So many ways to skin a cat!
Keeping sensible
Forget 5/6 axis for a while and start with three. One thing all of the triaglides need are pairs of struts forming parallelograms. Some of the drawings show ball joints but there is no need for this as the platforms to which they attach never tilt. You can do it a very simple way!
This lovely little machine:
is a delta robot, these also come in 6-axis varieties but this one is a 3-axis varient and as such also has parallelograms. Check out the website for the lovely video to see how it works.
The point to note is the simple joints:
Sorry for the picture (I photographed my screen when running the video) but I hope you can see the idea. The brown part runs through some bearings (in blue) and at each end is a part like this:

this is a clevis, used on the back ends of pneumatic cylinders and air springs, cheap and easy to get hold of and pretty accurate.
I think this is a very easy way to build a pretty nice system.
There's more
if you like the delta robots then you might like to build one. Assuming you can do the maths you still need the rotary actuators. Firstly remember that the smaller you build the thing the less resolution you need but you may still need some backlash free gearing between motor and the arm. Try this:

OK this is a 3-axis delta on its side. You can actually see that it uses rod ends for its joints, these ae held in place with a spring that pulls the two arms together and keeps the sockets on the balls. But back to the point you may well be able to see how the belt system works.

They use a massive pulley, 16 times bigger than the pinion. The belt is cut and clamped and the red idler keeps it out of mischief.
Story so far
Graham